
domingo, 26 de septiembre de 2010
viernes, 24 de septiembre de 2010
Limites y Continuidad
Muchas de las definiciones y técnicas del cálculo de funciones reales se pueden aplicar a funciones vectoriales.
Ejemplo: Las funciones vectoriales se pueden sumar y restar, multiplicar por una escalar “K”, tomar su límite, derivarlas, etc.
Se debe aprovechar la linealidad de las operaciones vectoriales y extender las definiciones en una base, componente por componente.
miércoles, 22 de septiembre de 2010
Funciones Vectoriales de una Variable Real
Las funciones vectoriales son aquellas cuyo dominio es un conjunto de números reales tales que su contradominio es un conjunto de vectores.
Las graficas de estas funciones son curvas, las cuales también pueden representarse mediante ecuaciones parametricas.
Anteriormente se introdujeron las ecuaciones parametricas al considerar que una partícula se mueve en plano de modo que las coordenadas (X, Y) de su posición en cualquier instante t están denominadas por las ecuaciones:
X =f (t); Y= g (t)
Dicha idea puede extenderse al espacio tridimensional (X, Y y Z), con las siguientes ecuaciones:
X =f (t); Y= g (t); Z = f (t)
Definición de una función vectorial de una Variable Real, Dominio y Graficacion
Una cuerva en el espacio C es un conjunto de todas las ternas ordenadas (f(t), g(t), h(t)) junto con sus ecuaciones parametricas:

Donde f, g, y h son funciones continuas de t en un intervalo I.

Es una función vectorial, donde las componentes f, g y h son funciones del parámetro t.
Para cualquier posición de la partícula existe un vector y los puntos terminales de la representación de la posición de estos vectores determinan una curva recorrida por la partícula. Esta idea nos lleva a considerar una función cuyo dominio es un conjunto de números reales tal que su contradominio es un conjunto de vectores. A esta función se le llama “Función Vectorial”.
Para cualquier posición de la partícula existe un vector y los puntos terminales de la representación de la posición de estos vectores determinan una curva recorrida por la partícula. Esta idea nos lleva a considerar una función cuyo dominio es un conjunto de números reales tal que su contradominio es un conjunto de vectores. A esta función se le llama “Función Vectorial”.
Graficación de una Circunferencia
Graficar una circunferencia con un radio de 5 con la siguiente función:
X2 + Y2 = 25 de -5 < 0 < 5
Al despejar Y, la ecuación queda de la siguiente forma
Y = √(25-X2)
Y tambien con la negativa de Y, para poder graficar la circunferencia
-Y = - √(25-X2)
Ahora le daremos valores a X de 0.1 en 0.1 comenzando desde -5 hasta a 5.
La grafica queda

martes, 21 de septiembre de 2010
Se denomina "Ecuación vectorial" la cual describe la curva C definiendo por las correspondientes ecuaciones parametricas, esto es, una curva puede definirse por medio de una ecuación vectorial o por un conjunto de ecuaciones parametricas.
Ejemplo:
La cueva plana definida por la ecuación vectorial:
R (t) = (4 – t2)i + (t2 + 4t)j
También puede definirse por las ecuaciones parametricas:
X = 4 - t2; y Y = t2 + 4t
Una ecuación vectorial de una curva proporciona una dirección a la curva en cada punto. Se puede considerar la dirección positiva a lo largo de la curva como la direccionen la que la partícula se mueve.
Al eliminar “t” de las ecuaciones parametricas se obtienen 2 ecuaciones, en X y Y, de nominadas ecuaciones cartesianas de la curva C. La grafica de la ecuación cartesiana es una superficie, y C es la intersección de las 2 superficies. Las ecuaciones de cualesquiera 2 superficies que contienen a C pueden considerarse como las ecuaciones que definen a C.
viernes, 10 de septiembre de 2010

Ecuacion Paramatrica y Rectangular
Ecuación paramétrica
En matemática, una ecuación paramétrica permite representar una curva o superficie en el plano o en el espacio, mediante valores arbitrarios, llamados parámetros, en lugar de mediante una variable independiente de cuyos valores se desprendan los de la variable dependiente. Un ejemplo simple de la cinemática, es cuando se usa un parámetro de tiempo para determinar la posición y la velocidad de un móvil.
Se conoce como Parametrización a la representación de una curva o superficie como imagen de una función vectorial. Su importancia radica en que permite tratar como funciones a curvas que no lo son si se las considera dentro del Sistema de coordenadas clásico, como por ejemplo las circunferencias y elipses. Aún así, es también utilizable para facilitar cálculos en sistemas de 4 o más variables, que no poseen representación gráfica.
Coordenadas Polares
El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del plano se determina por un ángulo y una distancia.
De manera más precisa, todo punto del plano corresponde a un par de coordenadas (r, θ) donde r es la distancia del punto al origen o polo y θ es el ángulo positivo en sentido antihorario medido desde el eje polar (equivalente al eje x del sistema cartesiano). La distancia se conoce como la «coordenada radial» mientras que el ángulo es la «coordenada angular» o «ángulo polar».
En el caso del origen de coordenadas, el valor de r es cero, pero el valor de θ es indefinido. En ocasiones se adopta la convención de representar el origen por (0,0º).
Ecuación Rectangular
Encuentre la acuacion rectangular con las siguientes ecuaciones:


En matemática, una ecuación paramétrica permite representar una curva o superficie en el plano o en el espacio, mediante valores arbitrarios, llamados parámetros, en lugar de mediante una variable independiente de cuyos valores se desprendan los de la variable dependiente. Un ejemplo simple de la cinemática, es cuando se usa un parámetro de tiempo para determinar la posición y la velocidad de un móvil.
Se conoce como Parametrización a la representación de una curva o superficie como imagen de una función vectorial. Su importancia radica en que permite tratar como funciones a curvas que no lo son si se las considera dentro del Sistema de coordenadas clásico, como por ejemplo las circunferencias y elipses. Aún así, es también utilizable para facilitar cálculos en sistemas de 4 o más variables, que no poseen representación gráfica.
Coordenadas Polares
El sistema de coordenadas polares es un sistema de coordenadas bidimensional en el cual cada punto o posición del plano se determina por un ángulo y una distancia.
De manera más precisa, todo punto del plano corresponde a un par de coordenadas (r, θ) donde r es la distancia del punto al origen o polo y θ es el ángulo positivo en sentido antihorario medido desde el eje polar (equivalente al eje x del sistema cartesiano). La distancia se conoce como la «coordenada radial» mientras que el ángulo es la «coordenada angular» o «ángulo polar».
En el caso del origen de coordenadas, el valor de r es cero, pero el valor de θ es indefinido. En ocasiones se adopta la convención de representar el origen por (0,0º).
Ecuación Rectangular
Encuentre la acuacion rectangular con las siguientes ecuaciones:

Desarrollo:

PRODUCTO DOBLE ESCALAR
Sean A y B dos vectores no paralelos, las representaciones de estos dos vectores, que tienen el mismo punto inicial, determinar un plano; la línea de acción de V es perpendicular al plano que contiene A y a B.
LA magnitud de B es el producto de las magnitudes de A y B por el seno de Ѳ formado por A y B, el cual debe ser mayor o igual a 180o
||A x B||= V = ABsen Ѳ
0 < Ѳ > π, sen Ѳ > 0
El sentido de V es tal que un observador localizado en un extremo V vera la rotación que lleva el vector A a la línea de acción del vector B en el sentido contrario al movimiento de las agujas del reloj.
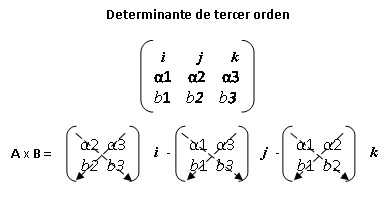
También se puede expresar de la siguiente manera:

martes, 7 de septiembre de 2010
Curva Plana
Si f y g son funciones continuas de t en un intervalo I, entonces las ecuaciones:
X = f(t) y Y = g(t)
se les llama ecuaciones parametricas y a t se le llama parametro. Al conjunto de puntos (X, Y) que se obtiene cuando t varia sobre el intervalo I, se le llama Grafica de las Ecuaciones Paramatricas. A las ecuaciones parametricas y a la grafica juntas, se les conoce como curva plana, que se denota por C.
Curva Plana:
Curva plana es aquella que reside en un solo plano y puede ser abierta (recta, parábola, hipérbola) o cerrada, (círculo, elipse).
La representación gráfica de una función real de una variable real es una curva plana.
Ejemplo:
Graficar las siguientes ecuaciones
La grafica queda de la siguiente manera:
.bmp)
X = f(t) y Y = g(t)
se les llama ecuaciones parametricas y a t se le llama parametro. Al conjunto de puntos (X, Y) que se obtiene cuando t varia sobre el intervalo I, se le llama Grafica de las Ecuaciones Paramatricas. A las ecuaciones parametricas y a la grafica juntas, se les conoce como curva plana, que se denota por C.
Curva Plana:
Curva plana es aquella que reside en un solo plano y puede ser abierta (recta, parábola, hipérbola) o cerrada, (círculo, elipse).
La representación gráfica de una función real de una variable real es una curva plana.
Ejemplo:
Graficar las siguientes ecuaciones
X = t2 – 4
Y = t/2
desde 0 - 2 <= t <= 3La grafica queda de la siguiente manera:
viernes, 3 de septiembre de 2010

Proyecciones y Componentes
Sean “U” y “V” vectores distintos de 0, sea U = W1 + W2, donde W1 es paralelo a V y, W2 es ortogonal a V.
1. A W1 se le llama la proyección de U en V, o la componente vectorial de U a lo largo de V, y se denota por:
W1= ProyV U
2. A W2 = U – W1 se le llama componente vectorial de U ortogonal a V.
Si U y V son vectores distintos de 0, entonces la proyección de U a V está dada por:
ProyV U=

La proyección de U en V puede expresarse como un múltiplo escalar de un vector unitario en dirección de V:
Al escalar K se le llama la componente de U en dirección de V
Angulo Entre Vectores
El ángulo entre 2 Vectores distintos de 0 es el ángulo Ѳ, 0 ≤ Ѳ ≤ π entre sus respetivos vectores en posición canoníca o estándar.
 Cos Ѳ = A * B
Cos Ѳ = A * B |A| |B|
A * B = |A||B|Cos Ѳ
Los términos Perpendicular, ortogonal y normal significan especialmente o mismo: formar ángulos rectos.
Es común decir que los vectores ortogonales, dos rectas o planos son perpendiculares y que un vector es normal a una recta o plano dado.
EJEMPLO: Los vectores <3, -4, 8> y <3/4, -1, 2>, son paralelos debido a que:
<3, -4, 8> = 4 <3/4, -1, 2>
EJEMPLO: Dados A = 3i + 2j y B = 2i + Kj, donde k es un escalar, determine:
A) K tal que A y B sean ortogonales.
<3, 2><2, K> = (3)(2) + (2)(K) = 6 + 2K
6 + 2K = 0
2K = -6
K = -3
B) Tal que A y B sean paralelos.
<3, 2> = <2, K>
2K = 3
K= 1.5 1.5K = 2
K = 4/3
Suscribirse a:
Comentarios (Atom)